Equilibrio traslacional: determinación, aplicaciones, ejemplos
El equilibrio traslacional es un estado en que un objeto en su conjunto se encuentra cuando todas las fuerzas que actúan sobre él se compensan, dando como resultado una fuerza neta nula. Matemáticamente equivale a decir que F1+ F2 + F3 +…. = 0, siendo F1, F2, F3… las fuerzas implicadas.
El hecho de que un cuerpo se encuentre en equilibrio traslacional no significa que necesariamente esté en reposo. Este es un caso particular de la definición dada anteriormente. El objeto puede estar en movimiento, pero en ausencia de aceleración, este será un movimiento rectilíneo uniforme.

De manera que si el cuerpo está en reposo sigue así. Y si ya posee movimiento, este tendrá velocidad constante. Por lo general, el movimiento de cualquier objeto es una composición de traslaciones y rotaciones. Las traslaciones pueden ser como se muestra en la figura 2: lineales o curvilíneas.
Pero si uno de los puntos del objeto es fijo, entonces la única posibilidad que tiene de moverse es rotar. Ejemplo de ello es un CD, cuyo centro está fijo. El CD tiene la posibilidad de rotar alrededor de un eje que pasa por dicho punto, pero no de trasladarse.
Cuando los objetos tienen puntos fijos o están apoyados sobre superficies, se habla de vínculos. Los vínculos interactúan limitando los movimientos que el objeto es capaz de realizar.
Índice del artículo
- 1 Determinación del equilibrio traslacional
- 2 Aplicaciones
- 3 Ejemplos de equilibrio traslacional
- 4 Referencias
Para una partícula en equilibrio es válido asegurar que:
FR = 0
O en notación de sumatoria:
Queda claro que para que un cuerpo esté en equilibrio traslacional, las fuerzas que sobre él actúan deben compensarse de alguna manera, para que su resultante sea nula.
De esta manera el objeto no experimentará aceleración y todas sus partículas están en reposo o bien experimentando traslaciones rectilíneas con velocidad constante.
Ahora bien, si los objetos pueden girar, generalmente lo harán. Por eso la mayor parte de los movimientos consisten en combinaciones de traslación y rotación.
Cuando el equilibrio rotacional es importante, puede que se necesite asegurar que el objeto no gire. Entonces hay que estudiar si existen torques o momentos actuando sobre él.
El torque es la magnitud vectorial de la cual dependen las rotaciones. Requiere que se aplique una fuerza, pero el punto de aplicación de esta también es importante. Para aclarar la idea considérese un objeto extendido sobre el cual actúa una fuerza F y veamos si es capaz de producir una rotación respecto a algún eje O.
Ya se intuye que al empujar al objeto en el punto P con la fuerza F, es posible hacerlo girar alrededor del punto O, con giro en sentido antihorario. Pero la dirección en que se aplique la fuerza también es importante. Por ejemplo la fuerza aplicada en la figura del medio no logrará hacer girar al objeto, aunque sin duda puede moverlo.
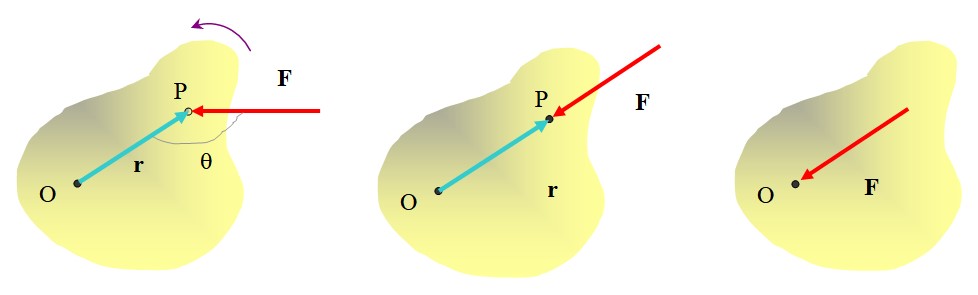
Aplicar la fuerza directamente en el punto O no servirá para hacer girar al objeto tampoco. Entonces está claro que para conseguir un efecto de rotación, la fuerza debe aplicarse a cierta distancia del eje de giro y su línea de acción no debe pasar por dicho eje.
El torque o momento de una fuerza, denotado como τ la magnitud vectorial encargada de poner todos estos hechos juntos, se define como:
τ= r x F
El vector r está dirigido desde el eje de giro hasta el punto de aplicación de la fuerza y la participación del ángulo entre r y F es importante. Por ello la magnitud del torque se expresa como:
τ = r.F.sen q
El torque más efectivo tiene lugar cuando r y F son perpendiculares.
Ahora bien, si se desea que no existan rotaciones o estas transcurran con aceleración angular constante, es necesario que la sumatoria de los torques actuando sobre el objeto sea nula, de manera análoga a lo que se consideró para las fuerzas:
El equilibrio significa estabilidad, armonía y balance. Para que el movimiento de un objeto posea estas características, deben aplicarse las condiciones descritas en los apartados anteriores:
1) F1+ F2 + F3 +…. = 0
2) τ1+ τ2 + τ3 +…. = 0
La primera condición garantiza el equilibrio traslacional y la segunda el rotacional. Ambas deben cumplirse si se quiere que el objeto permanezca en equilibrio estático (ausencia de movimiento de cualquier clase).
Las condiciones de equilibrio son aplicables a numerosas estructuras, ya que cuando se construyen edificaciones u objetos diversos, se hace con la intención de que sus partes se mantengan en las mismas posiciones relativas unas con otras. En otras palabras, que el objeto no se desarme.
Esto es importante por ejemplo a la hora de construir puentes que se mantienen firmes bajo los pies, o al diseñar estructuras habitables que no cambien de posición o tengan tendencia a volcar.
Si bien se cree que el movimiento rectilíneo uniforme es una simplificación extrema del movimiento, que suele darse poco en la naturaleza, hay que recordar que la velocidad de la luz en el vacío es constante, y la del sonido en el aire también, si se considera homogéneo al medio.
En muchas estructuras móviles hechas por el hombre es importante que se mantenga una rapidez constante: por ejemplo, en escaleras mecánicas y líneas de montaje.
Este es el clásico ejercicio de las tensiones que sujetan la lámpara en equilibrio. Se sabe que la lámpara pesa 15 kg. Encontrar las magnitudes de las tensiones necesarias para mantenerla en esta posición.
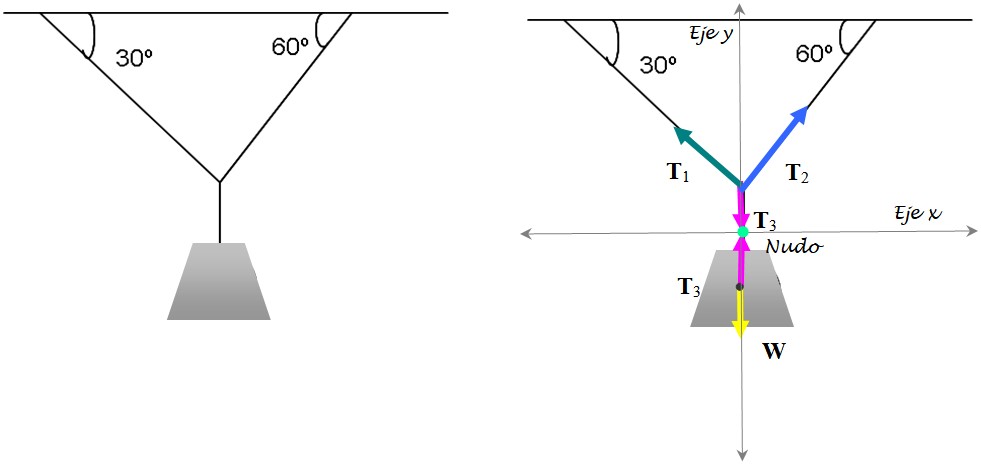
Para resolverlo nos enfocamos en el nudo donde confluyen las tres cuerdas. Los respectivos diagramas de cuerpo libre para el nudo y para la lámpara se muestran en la figura de arriba.
El peso de la lámpara es W = 5 Kg . 9.8 m/s2 = 49 N. Para que la lámpara esté en equilibrio basta con que se cumpla la primera condición de equilibrio:
T3 – W = 0
T3 = W =49 N.
Las tensiones T1 y T2 deben descomponerse:
T1y + T2y – T3 = 0 (Sumatoria de fuerzas a lo largo del eje y)
–T1x +T2x = 0 (Sumatoria de fuerzas a lo largo del eje x)
Aplicando la trigonometría:
T1.cos 60º +T2 .cos 30º = 49
– T1.sen60º +T2.sen30º = 0
Se trata de un sistema de dos ecuaciones con dos incógnitas, cuya respuesta es: T1 = 24.5 N y T2 =42.4 N.
- Rex, A. 2011. Fundamentos de Física. Pearson. 76 – 90.
- Serway, R., Jewett, J. (2008). Física para Ciencias e Ingeniería. Volumen 1. 7ma. Ed. Cengage Learning. 120 – 124.
- Serway, R., Vulle, C. 2011. Fundamentos de Física. 9na Ed. Cengage Learning. 99-112.
- Tippens, P. 2011. Física: Conceptos y Aplicaciones. 7ma Edición. MacGraw Hill. 71 – 87.
- Walker, J. 2010. Physics. Addison Wesley. 332 -346.