Regla de la mano derecha: primera y segunda regla, aplicaciones, ejercicios
¿Qué es la regla de la mano derecha?
La regla de la mano derecha es un recurso mnemotécnico para establecer la dirección y el sentido del vector resultante de un producto vectorial o producto cruz. Se utiliza ampliamente en física, ya que existen importantes magnitudes vectoriales que son el resultado de un producto vectorial. Tal es el caso del torque, la fuerza magnética, el momento angular y el momento magnético, por ejemplo.
Sean dos vectores genéricos a y b cuyo producto cruz es a x b. El módulo de tal vector es:
a x b = a.b.sen α
Donde α es el ángulo mínimo entre a y b, mientras que a y b representan sus módulos. Para distinguir los vectores de sus módulos se utilizan letras negritas.
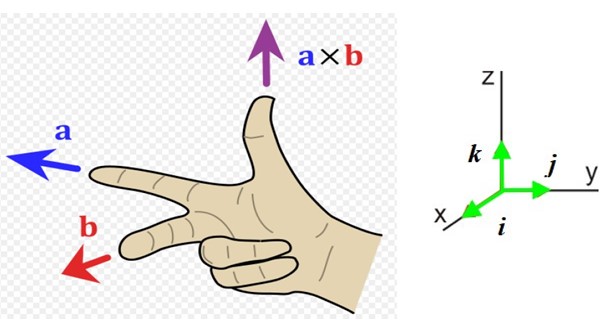
Ahora falta conocer la dirección y el sentido de este vector, por lo que conviene disponer de un sistema de referencia con las tres direcciones del espacio (figura 1 derecha). Los vectores unitarios i, j y k apuntan respectivamente hacia el lector (fuera de la página), a la derecha y hacia arriba.
En el ejemplo de la figura 1 izquierda, el vector a se dirige hacia la izquierda (dirección y negativa y dedo índice de la mano derecha) y el vector b va hacia el lector (dirección x positiva, dedo medio de la mano derecha).
El vector resultante a x b tiene la dirección del pulgar, hacia arriba en la dirección z positiva.
Segunda regla de la mano derecha
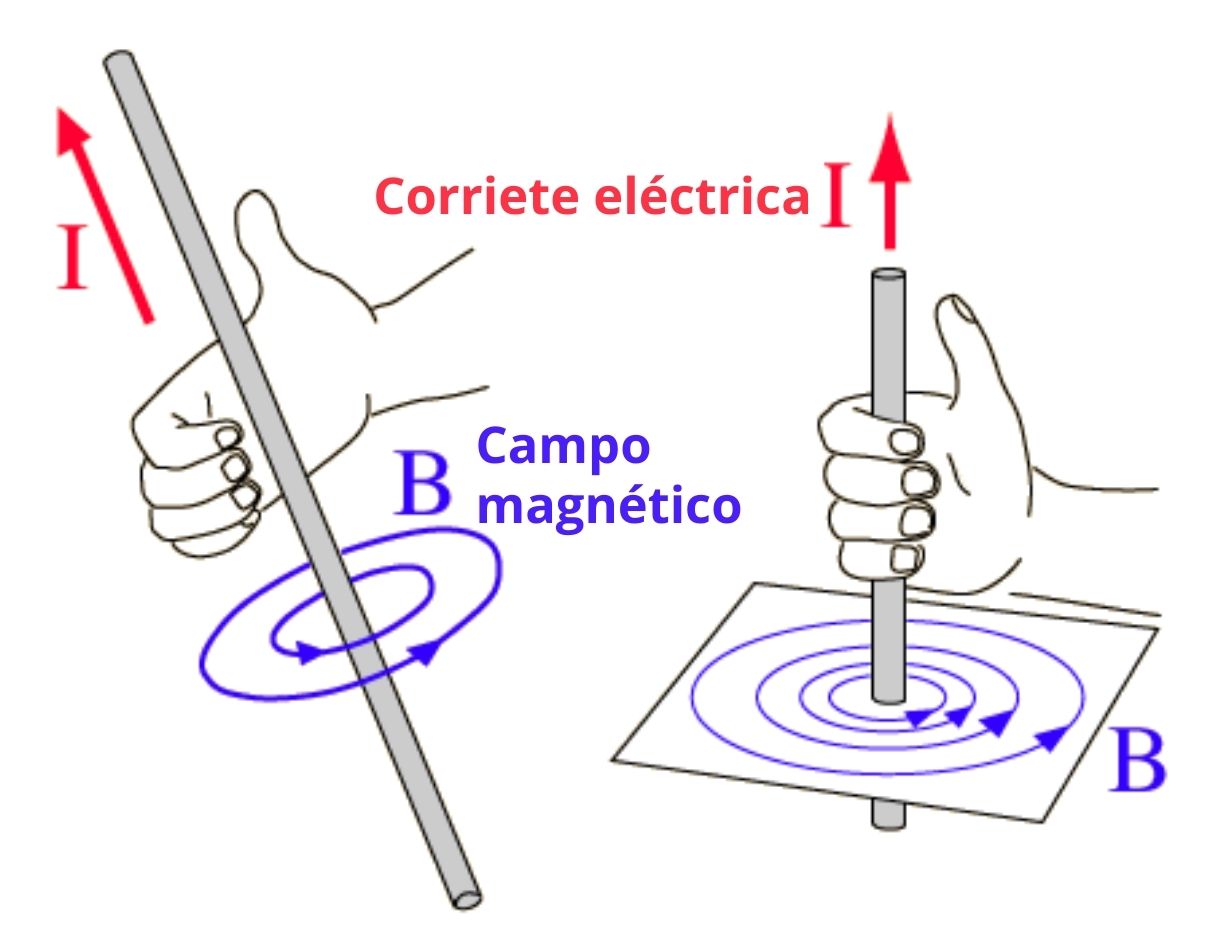
Esta regla se utiliza mucho cuando existen magnitudes cuya dirección y sentido van rotando, como por ejemplo el campo magnético B producido por un alambre delgado y rectilíneo que transporta una corriente.
En tal caso las líneas de campo magnético son circunferencias concéntricas con el alambre, y el sentido del giro se obtiene con esta regla de la siguiente forma: el pulgar derecho señala la dirección de la corriente y los cuatro dedos restantes se curvan en la dirección del campo. Ilustramos el concepto en la figura 2.
Regla alternativa de la mano derecha
La siguiente figura muestra una forma alternativa de la regla de la mano derecha. Los vectores que aparecen en la ilustración son:
- La velocidad v de una carga puntual q.
- El campo magnético B dentro del cual se mueve la carga.
- FB la fuerza que el campo magnético ejerce sobre la carga.
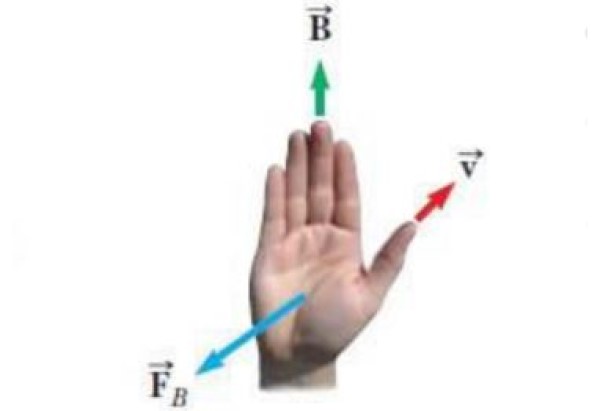
La ecuación para la fuerza magnética es FB =qv x B y la regla de la mano derecha para conocer la dirección y el sentido de FB se aplica así: el pulgar apunta según v, los cuatro dedos restantes se colocan de acuerdo al campo B. Entonces FB es un vector que sale de la palma de la mano, perpendicular a esta, como si estuviera empujando la carga.
Observe que FB apuntaría en sentido contrario si la carga q fuese negativa, ya que el producto vectorial no es conmutativo. De hecho:
a x b = – b x a
Aplicaciones
La regla de la mano derecha se puede aplicar para diversas magnitudes físicas, conozcamos algunas de ellas:
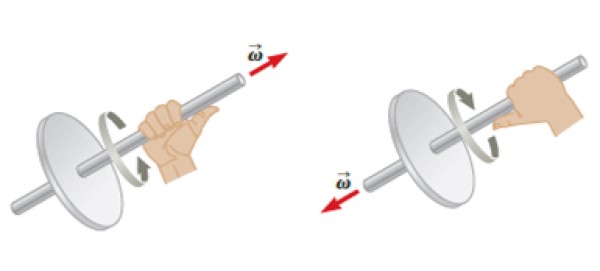
Velocidad y aceleración angulares
Tanto la velocidad angular ω como la aceleración angular α son vectores. Si un objeto está rotando alrededor de un eje fijo, es posible asignar la dirección y el sentido de estos vectores mediante la regla de la mano derecha: los cuatro dedos se enrollan siguiendo la rotación y el pulgar ofrece de inmediato la dirección y el sentido de la velocidad angular ω.
Por su parte la aceleración angular α tendrá la misma dirección que ω, pero su sentido depende de si ω aumenta o disminuye su magnitud con el tiempo. En el primer caso, ambos tienen igual dirección y sentido, pero en el segundo tendrán sentidos contrarios.
El momento angular
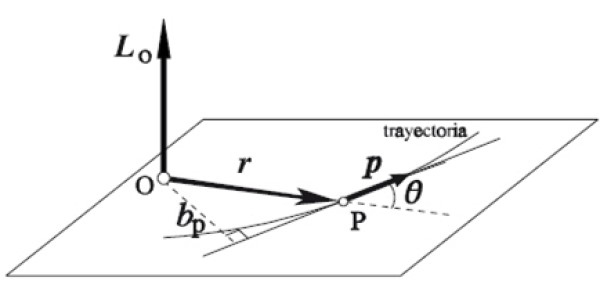
El vector momento angular LO de una partícula que rota alrededor de cierto eje O se define como el producto vectorial de su vector de posición instantáneo r y la cantidad de movimiento lineal p:
L = r x p
La regla de la mano derecha se aplica de esta forma: el dedo índice se coloca en la misma dirección y sentido de r, el dedo medio en la de p, ambos sobre un plano horizontal, como en la figura. Automáticamente el pulgar se extiende verticalmente hacia arriba señalando la dirección y el sentido del momento angular LO.
Ejercicios
Ejercicio 1
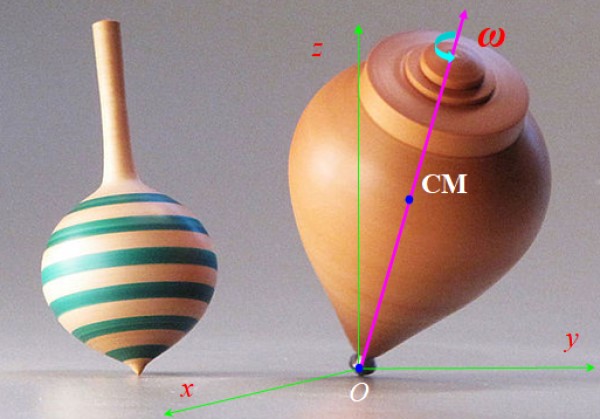
El trompo de la figura 6 está girando rápidamente con velocidad angular ω y su eje de simetría rota más lentamente alrededor del eje vertical z. Este movimiento se denomina precesión. Describa las fuerzas que actúan sobre el trompo y el efecto que producen.
Solución
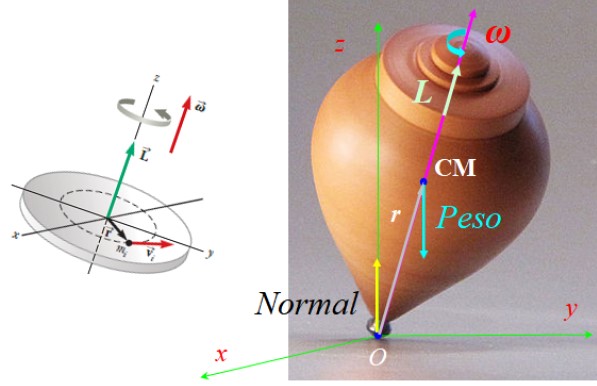
Las fuerzas que actúan sobre el trompo son la normal N, aplicada sobre el punto de apoyo con el suelo O más el peso Mg, aplicado en el centro de masa CM, con g el vector aceleración de gravedad, dirigido verticalmente hacia abajo (ver figura 7).
Ambas fuerzas se equilibran, por lo tanto el trompo no se traslada. Sin embargo el peso produce un torque o momento de torsión τ neto respecto al punto O, dado por:
τO = rO x F, con F = Mg.
Como r y Mg siempre están en mismo plano a medida que el trompo gira, de acuerdo a la regla de la mano derecha el torque τO se ubica siempre en el plano xy, perpendicular tanto a r como g.
Observe que N no produce un momento de torsión respecto a O, porque su vector r respecto a O es nulo. Ese torque produce un cambio en el momentum angular que causa la precesión del trompo en torno al eje Z.
Ejercicio 2
Señale la dirección y el sentido del vector momento angular L del trompo de la figura 6.
Solución
Un punto cualquiera del trompo tiene masa mi, velocidad vi y vector de posición ri, cuando gira alrededor del eje z. El momento angular Li de dicha partícula es:
Li = ri x pi = ri x mivi
Dado que riy vison perpendiculares, la magnitud de L es:
Li = mirivi
La velocidad lineal v está relacionada con la de la velocidad angular ω mediante:
vi = riω
Por lo tanto:
Li = miri (riω) = miri2ω
El momento angular total del trompo L es la sumatoria del momento angular de cada partícula:
L = (∑miri2 )ω
∑ miri2 es el momento de inercia I del trompo, luego:
L= Iω
Por lo tanto L y ω tienen la misma dirección y sentido, tal como se muestra en la figura 7.